本文基于北京大学软件与微电子学院曹健老师的Tensorflow笔记整理——b站视频教程

LeNet
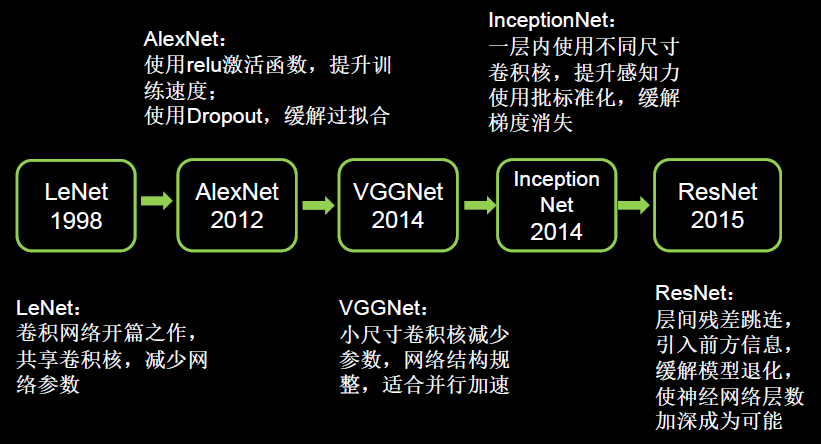
借鉴点:共享卷积核,减少网络参数。
实现LeNet5
class LeNet5(Model):
def __init__(self):
super(LeNet5, self).__init__()
self.c1 = Conv2D(filters=6, kernel_size=(5, 5),
activation='sigmoid')
self.p1 = MaxPool2D(pool_size=(2, 2), strides=2)
self.c2 = Conv2D(filters=16, kernel_size=(5, 5),
activation='sigmoid')
self.p2 = MaxPool2D(pool_size=(2, 2), strides=2)
self.flatten = Flatten()
self.f1 = Dense(120, activation='sigmoid')
self.f2 = Dense(84, activation='sigmoid')
self.f3 = Dense(10, activation='softmax')
def call(self, x):
x = self.c1(x)
x = self.p1(x)
x = self.c2(x)
x = self.p2(x)
x = self.flatten(x)
x = self.f1(x)
x = self.f2(x)
y = self.f3(x)
return y
model = LeNet5()AlexNet
借鉴点:激活函数使用 Relu,提升了训练速度;加入Dropout 防止过拟合。
AlexNet 的总体结构和 LeNet5 有相似之处,但是有一些很重要的改进:
A)由五层卷积、三层全连接组成,输入图像尺寸为 224 * 224 * 3,网络规模远大于 LeNet5;
B)使用了 Relu 激活函数;
C)进行了舍弃(Dropout)操作,以防止模型过拟合,提升鲁棒性;
D)增加了一些训练上的技巧,包括数据增强、学习率衰减、权重衰减(L2 正则化)等。
实现AlexNet8
class AlexNet8(Model):
def __init__(self):
super(AlexNet8, self).__init__()
self.c1 = Conv2D(filters=96, kernel_size=(3, 3))
self.b1 = BatchNormalization()
self.a1 = Activation('relu')
self.p1 = MaxPool2D(pool_size=(3, 3), strides=2)
self.c2 = Conv2D(filters=256, kernel_size=(3, 3))
self.b2 = BatchNormalization()
self.a2 = Activation('relu')
self.p2 = MaxPool2D(pool_size=(3, 3), strides=2)
self.c3 = Conv2D(filters=384, kernel_size=(3, 3), padding='same',
activation='relu')
self.c4 = Conv2D(filters=384, kernel_size=(3, 3), padding='same',
activation='relu')
self.c5 = Conv2D(filters=256, kernel_size=(3, 3), padding='same',
activation='relu')
self.p3 = MaxPool2D(pool_size=(3, 3), strides=2)
self.flatten = Flatten()
self.f1 = Dense(2048, activation='relu')
self.d1 = Dropout(0.5)
self.f2 = Dense(2048, activation='relu')
self.d2 = Dropout(0.5)
self.f3 = Dense(10, activation='softmax')
def call(self, x):
x = self.c1(x)
x = self.b1(x)
x = self.a1(x)
x = self.p1(x)
x = self.c2(x)
x = self.b2(x)
x = self.a2(x)
x = self.p2(x)
x = self.c3(x)
x = self.c4(x)
x = self.c5(x)
x = self.p3(x)
x = self.flatten(x)
x = self.f1(x)
x = self.d1(x)
x = self.f2(x)
x = self.d2(x)
y = self.f3(x)
return y
model = AlexNet8()VGGNet
借鉴点:采用小卷积核减少参数的同时,提高识别准确率;网络结构规整,适合并行加速。
实现VGG16
class VGG16(Model):
def __init__(self):
super(VGG16, self).__init__()
self.c1 = Conv2D(filters=64, kernel_size=(3, 3), padding='same') # 卷积层1
self.b1 = BatchNormalization() # BN层1
self.a1 = Activation('relu') # 激活层1
self.c2 = Conv2D(filters=64, kernel_size=(3, 3), padding='same', )
self.b2 = BatchNormalization() # BN层1
self.a2 = Activation('relu') # 激活层1
self.p1 = MaxPool2D(pool_size=(2, 2), strides=2, padding='same')
self.d1 = Dropout(0.2) # dropout层
self.c3 = Conv2D(filters=128, kernel_size=(3, 3), padding='same')
self.b3 = BatchNormalization() # BN层1
self.a3 = Activation('relu') # 激活层1
self.c4 = Conv2D(filters=128, kernel_size=(3, 3), padding='same')
self.b4 = BatchNormalization() # BN层1
self.a4 = Activation('relu') # 激活层1
self.p2 = MaxPool2D(pool_size=(2, 2), strides=2, padding='same')
self.d2 = Dropout(0.2) # dropout层
self.c5 = Conv2D(filters=256, kernel_size=(3, 3), padding='same')
self.b5 = BatchNormalization() # BN层1
self.a5 = Activation('relu') # 激活层1
self.c6 = Conv2D(filters=256, kernel_size=(3, 3), padding='same')
self.b6 = BatchNormalization() # BN层1
self.a6 = Activation('relu') # 激活层1
self.c7 = Conv2D(filters=256, kernel_size=(3, 3), padding='same')
self.b7 = BatchNormalization()
self.a7 = Activation('relu')
self.p3 = MaxPool2D(pool_size=(2, 2), strides=2, padding='same')
self.d3 = Dropout(0.2)
self.c8 = Conv2D(filters=512, kernel_size=(3, 3), padding='same')
self.b8 = BatchNormalization() # BN层1
self.a8 = Activation('relu') # 激活层1
self.c9 = Conv2D(filters=512, kernel_size=(3, 3), padding='same')
self.b9 = BatchNormalization() # BN层1
self.a9 = Activation('relu') # 激活层1
self.c10 = Conv2D(filters=512, kernel_size=(3, 3), padding='same')
self.b10 = BatchNormalization()
self.a10 = Activation('relu')
self.p4 = MaxPool2D(pool_size=(2, 2), strides=2, padding='same')
self.d4 = Dropout(0.2)
self.c11 = Conv2D(filters=512, kernel_size=(3, 3), padding='same')
self.b11 = BatchNormalization() # BN层1
self.a11 = Activation('relu') # 激活层1
self.c12 = Conv2D(filters=512, kernel_size=(3, 3), padding='same')
self.b12 = BatchNormalization() # BN层1
self.a12 = Activation('relu') # 激活层1
self.c13 = Conv2D(filters=512, kernel_size=(3, 3), padding='same')
self.b13 = BatchNormalization()
self.a13 = Activation('relu')
self.p5 = MaxPool2D(pool_size=(2, 2), strides=2, padding='same')
self.d5 = Dropout(0.2)
self.flatten = Flatten()
self.f1 = Dense(512, activation='relu')
self.d6 = Dropout(0.2)
self.f2 = Dense(512, activation='relu')
self.d7 = Dropout(0.2)
self.f3 = Dense(10, activation='softmax')
def call(self, x):
x = self.c1(x)
x = self.b1(x)
x = self.a1(x)
x = self.c2(x)
x = self.b2(x)
x = self.a2(x)
x = self.p1(x)
x = self.d1(x)
x = self.c3(x)
x = self.b3(x)
x = self.a3(x)
x = self.c4(x)
x = self.b4(x)
x = self.a4(x)
x = self.p2(x)
x = self.d2(x)
x = self.c5(x)
x = self.b5(x)
x = self.a5(x)
x = self.c6(x)
x = self.b6(x)
x = self.a6(x)
x = self.c7(x)
x = self.b7(x)
x = self.a7(x)
x = self.p3(x)
x = self.d3(x)
x = self.c8(x)
x = self.b8(x)
x = self.a8(x)
x = self.c9(x)
x = self.b9(x)
x = self.a9(x)
x = self.c10(x)
x = self.b10(x)
x = self.a10(x)
x = self.p4(x)
x = self.d4(x)
x = self.c11(x)
x = self.b11(x)
x = self.a11(x)
x = self.c12(x)
x = self.b12(x)
x = self.a12(x)
x = self.c13(x)
x = self.b13(x)
x = self.a13(x)
x = self.p5(x)
x = self.d5(x)
x = self.flatten(x)
x = self.f1(x)
x = self.d6(x)
x = self.f2(x)
x = self.d7(x)
y = self.f3(x)
return y
model = VGG16()
InceptionNet
借鉴点:一层内使用不同尺寸的卷积核,提升感知力(通过 padding 实现输出特征面积一致);使用 1 * 1 卷积核,改变输出特征 channel 数(减少网络参数)。
InceptionNet 即 GoogLeNet,诞生于 2015 年,旨在通过增加网络的宽度来提升网络的能力,与 VGGNet 通过卷积层堆叠的方式(纵向)相比,是一个不同的方向(横向)。显然,InceptionNet 模型的构建与 VGGNet 及之前的网络会有所区别,不再是简单的纵向堆叠.
InceptionNet 网络不再像 VGGNet 一样有三层全连接层(全连接层的参数量占 VGGNet总参数量的 90 %),而是采用“全局平均池化+全连接层”的方式,这减少了大量的参数。
这里介绍一下全局平均池化,在 tf.keras 中用 GlobalAveragePooling2D 函数实现,相比于平均池化(在特征图上以窗口的形式滑动,取窗口内的平均值为采样值),全局平均池化不再以窗口滑动的形式取均值,而是直接针对特征图取平均值,即每个特征图输出一个值。通过这种方式,每个特征图都与分类概率直接联系起来,这替代了全连接层的功能,并且不产生额外的训练参数,减小了过拟合的可能,但需要注意的是,使用全局平均池化会导致网络收敛的速度变慢。 总体来看,InceptionNet 采取了多尺寸卷积再聚合的方式拓宽网络结构,并通过 1 * 1的卷积运算来减小参数量,取得了比较好的效果,与同年诞生的 VGGNet 相比,提供了卷积神经网络构建的另一种思路。但 InceptionNet 的问题是,当网络深度不断增加时,训练会十分困难,甚至无法收敛(这一点被 ResNet 很好地解决了)。
实现Inception10
class Inception10(Model):
def __init__(self, num_blocks, num_classes, init_ch=16, **kwargs):
super(Inception10, self).__init__(**kwargs)
self.in_channels = init_ch
self.out_channels = init_ch
self.num_blocks = num_blocks
self.init_ch = init_ch
self.c1 = ConvBNRelu(init_ch)
self.blocks = tf.keras.models.Sequential()
for block_id in range(num_blocks):
for layer_id in range(2):
if layer_id == 0:
block = InceptionBlk(self.out_channels, strides=2)
else:
block = InceptionBlk(self.out_channels, strides=1)
self.blocks.add(block)
# enlarger out_channels per block
self.out_channels *= 2
self.p1 = GlobalAveragePooling2D()
self.f1 = Dense(num_classes, activation='softmax')
def call(self, x):
x = self.c1(x)
x = self.blocks(x)
x = self.p1(x)
y = self.f1(x)
return y
model = Inception10(num_blocks=2, num_classes=10)ResNet
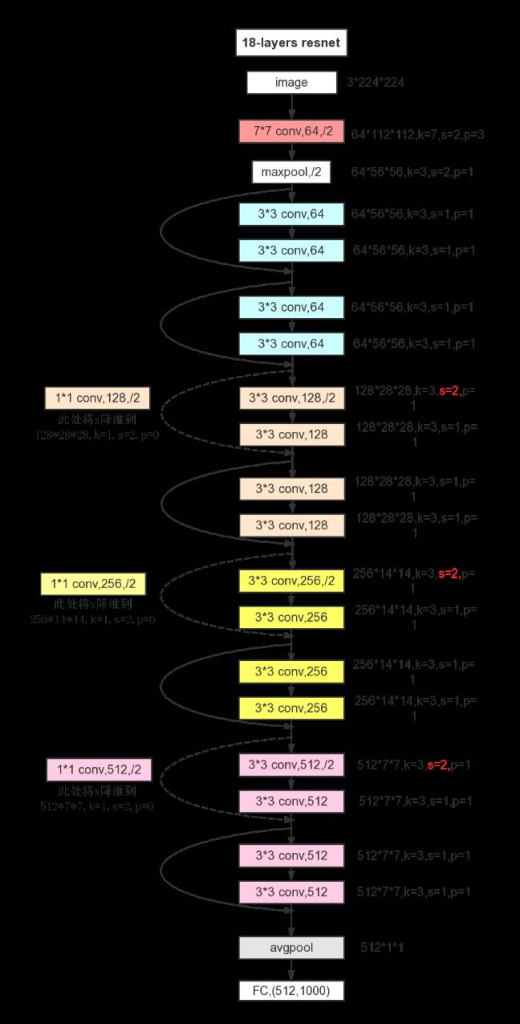
借鉴点:层间残差跳连,引入前方信息,减少梯度消失,使神经网络层数变身成为可能。
ResNet 即深度残差网络,由何恺明及其团队提出,是深度学习领域又一具有开创性的工作,通过对残差结构的运用,ResNet 使得训练数百层的网络成为了可能,从而具有非常强大的表征能力,其网络结构如下图 所示。

ResNet 解决的正是这个问题,其核心思路为:对一个准确率达到饱和的浅层网络,在它后面加几个恒等映射层(即 y = x,输出等于输入),增加网络深度的同时不增加误差。这使得神经网络的层数可以超越之前的约束,提高准确率。
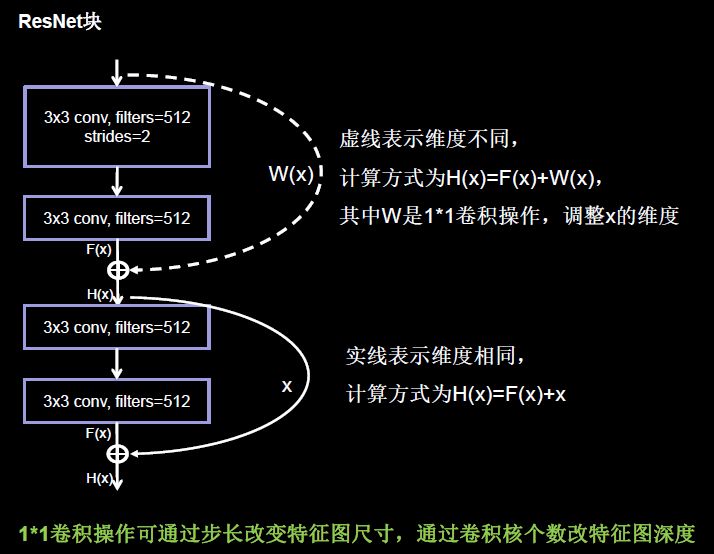
上图中的实线和虚线均表示恒等映射,实线表示通道相同,计算方式为 H(x) = F(x) + x;虚线表示通道不同,计算方式为 H(x) = F(x) + Wx,其中 W 为卷积操作,目的是调整 x 的维度(通道数)。
实现ResNet18
class ResnetBlock(Model):
def __init__(self, filters, strides=1, residual_path=False):
super(ResnetBlock, self).__init__()
self.filters = filters
self.strides = strides
self.residual_path = residual_path
self.c1 = Conv2D(filters, (3, 3), strides=strides, padding='same', use_bias=False)
self.b1 = BatchNormalization()
self.a1 = Activation('relu')
self.c2 = Conv2D(filters, (3, 3), strides=1, padding='same', use_bias=False)
self.b2 = BatchNormalization()
# residual_path为True时,对输入进行下采样,即用1x1的卷积核做卷积操作,保证x能和F(x)维度相同,顺利相加
if residual_path:
self.down_c1 = Conv2D(filters, (1, 1), strides=strides, padding='same', use_bias=False)
self.down_b1 = BatchNormalization()
self.a2 = Activation('relu')
def call(self, inputs):
residual = inputs # residual等于输入值本身,即residual=x
# 将输入通过卷积、BN层、激活层,计算F(x)
x = self.c1(inputs)
x = self.b1(x)
x = self.a1(x)
x = self.c2(x)
y = self.b2(x)
if self.residual_path:
residual = self.down_c1(inputs)
residual = self.down_b1(residual)
out = self.a2(y + residual) # 最后输出的是两部分的和,即F(x)+x或F(x)+Wx,再过激活函数
return out
class ResNet18(Model):
def __init__(self, block_list, initial_filters=64): # block_list表示每个block有几个卷积层
super(ResNet18, self).__init__()
self.num_blocks = len(block_list) # 共有几个block
self.block_list = block_list
self.out_filters = initial_filters
self.c1 = Conv2D(self.out_filters, (3, 3), strides=1, padding='same', use_bias=False)
self.b1 = BatchNormalization()
self.a1 = Activation('relu')
self.blocks = tf.keras.models.Sequential()
# 构建ResNet网络结构
for block_id in range(len(block_list)): # 第几个resnet block
for layer_id in range(block_list[block_id]): # 第几个卷积层
if block_id != 0 and layer_id == 0: # 对除第一个block以外的每个block的输入进行下采样
block = ResnetBlock(self.out_filters, strides=2, residual_path=True)
else:
block = ResnetBlock(self.out_filters, residual_path=False)
self.blocks.add(block) # 将构建好的block加入resnet
self.out_filters *= 2 # 下一个block的卷积核数是上一个block的2倍
self.p1 = tf.keras.layers.GlobalAveragePooling2D()
self.f1 = tf.keras.layers.Dense(10, activation='softmax', kernel_regularizer=tf.keras.regularizers.l2())
def call(self, inputs):
x = self.c1(inputs)
x = self.b1(x)
x = self.a1(x)
x = self.blocks(x)
x = self.p1(x)
y = self.f1(x)
return y
model = ResNet18([2, 2, 2, 2])下面对上述的 5 种CNN经典结构进行小结
另外还有 DenseNet [Huang et al., 2017] 在某种程度上作为ResNet的逻辑扩展,其目的也是避免梯度消失。
Comments NOTHING